电磁流量计中的抗干扰技术
为了抑制和排除电磁流量计测量过程中的干扰,提髙信噪比,提髙测量的精确度和稳定性,讨论了电磁流量计几 类干扰噪声产生的物理机理和特征,简要阐述了电磁流量计的几种硬件和软件方面的抗干扰技术。硬件方面设计了髙精 度低功耗的矩形波激磁电路,并从激磁电路中引出A/ D转换器的参考电压,提髙了 A/ D转换结果的抗干扰能力。软件方 面主要釆用“计算斜率法”和“正负差值法”相结合的方法消除零点漂移。实验表明,这些方法在智能电磁流量计的测量过 程中取得了明显的效果。
0.引言
电磁流量计是利用法拉第电磁感应定律来测量导 电液体的体积流量的仪表,具有很多突出的优点,例 如:无可动部件,不会产生压力损失和堵塞管道;测量 导电介质的流量,不受温度、黏度、密度、压力、雷诺数 以及在一定范围内电导率变化的影响;测量原理为线 性,精度高,测量范围大;耐腐蚀性好并且可测量正反 流速等等⑴。但在实际测量中,干扰信号与有用的信 号混在一起,它们不仅成分复杂,而且有时候干扰信号 还会比流量信号大。在这种情况下怎样抑制和排除这 些干扰,提高信噪比,提高测量的精确度和稳定性就成 了研制和使用电磁流量计的一个技术关键。
以往的电磁流量计的设计很多还有待改进,例如: 激磁电路基本采用模拟式恒流源,功耗大的同时也引 入了干扰,并且精确度不高⑴;转换器大多使用8位或 16位的单片机,较为复杂的算法就难以实现或响应时 间过慢[2];抗干扰主要集中在硬件电路的设计等。本 系统采用32位ARM处理器,提高数据处理能力和算 法复杂度;并设计了低功耗的激磁电路,同时利用反馈 原理消除激励电流不稳定对A/D转换结果的影响并 在软件算法和硬件电路方面提出了有效的消除零点漂 移以及其他干扰的措施,使电磁流量计测量精度更为 提髙。
1.电磁流量计的测量原理
由法拉第电磁感应定律可知,当导体在磁场中做 切割磁力线运动时,在导体两端就产生感应电动势。 设在磁场强度为B的均勻磁场中放置一个垂直于磁 场方向的直径为D的管道,当导电液体在管道中流动时,导电液体切割磁力线,就会在和磁场及流动方向垂 直的方向产生感应电动势。如果在管道截面上垂直于 磁场的直径两端安装一对电极,两电极之间就会产生 感应电动势n 1。如管道内流速v为轴对称分布,不考 虑感应电动势的正负可得:
U =d.0 = B,d A = BD d 1 = BDv d t d t d t
其中,B为磁感应强度为磁通量变化面积,D 为导体长度,d 1为被测介质运动的距离,v为被测介 质运动的速度,U为感应电动势。
所测液体的体积流量为:式(1)说明,导体在磁场内作切割磁力线运动,导 体两端产生的感应电动势的大小与磁感应强度B成 正比,与导体的长度D成正比,与导体运动的速度v 成正比。由式(2)可知液体的体积流量与感应电动势 成正比,这就是电磁流量计的设计原理。
2.电磁流量计中的干扰源分析
传感器提供给转换器的流量信号是电极间的电位 差,即一种电压信号。在实际测量中,由于电磁感应、 静电感应以及电化学电势等原因,电极上所得到的电 压不仅仅是与流速成比例的电动势,也包含各种各样 的干扰成分在内。
首先电磁流量计工作现场存在大量的工频信号, 耦合在激磁回路、电极、前端放大器的工频干扰噪声对 流量测量的准确性造成极大的影响。其次,在低频矩 形波激磁方式下,其干扰主要表现为由激磁电流突变 产生的微分干扰信号,随着电流的稳定,干扰信号随之 消失;另外,由于电磁流量传感器的“变压器效应”,会 产生相位上与流量信号相差90°的正交干扰信号;此 外,由于电磁屏蔽缺陷,接地不良,杂散电容等引起返 回电流不平衡产生共模干扰,它可能导致电路某些参 考电位变化,是造成电磁流量计零点漂移的原因之一, 同时产生高的辐射电场使电路的电磁兼容性恶化;串 模干扰是由于印刷电路板设计电磁兼容性考虑不足造 成的信号质量下降,特别是高速走线和模拟电路易受 到影响;还有就是电化学极化电动势干扰,它是被测液 体中电解质在感应电场作用下在电极表面极化产生, 是电磁流量计零点漂移的主要原因[3]。
3.电磁流量计的抗干扰措施及其效果分析
3.1髙精度的激磁电路的设计
该系统采用6.25Hz的双极性低频矩形波激磁,直流激磁产生的电极极化 效应,也可以克服工频正弦波激磁产生的正交干扰影 响。
以往的激磁电路的设计都是采用恒流源和可控开 关电路组成。恒流源是由电压基准、比较放大、控制调 整和采样等部分组成的直流负反馈自动调节系统,常 用的激磁电路就是用串联调整型恒流电源盒控制开关 组成的,如图1。其中Kref是参考电压,Rs是采样电 阻’ Is为流过Rs的电流,就是所需的恒流,RL为电磁 流量传感器线圈,K1、K2、K3、K4为可控开关,以达到 使线圈RL中流经正负交换的电流,对传感器激磁。

= Vs = Vref s = Rs = Rs 由此可知,要想获得一个稳定的输出电流Is ,首 先,必须要提供一个高精度的基准电压和高精度采样 电阻。由于运放在调整控制过程中的作用’运放的增益 直接影响输出电流的精度,高增益和低漂移的运放是 必要的选择。由于采样电阻与负载串连,流过的电流通 常比较大,因此局部温度也会随之上升,导致元器件温 度上升,恒流源的温度稳定性变坏,采样电阻Rs随温 度或其他环境参数的变化而改变’势必影响Is的精 度。其次,恒流电源的输出电流全部流过调整管,因此 调整管上的功耗也很大,必须选择大功率的晶体管,然 而大功率晶体管需要较大的基极驱动电流,以满足对 运放有较高驱动能力的要求。再次,双极型三极管的 漏电流和电流放大系数对温度比较敏感,温度稳定性 较差。还有,电压电流变换器使用的负反馈闭环控制, 电流稳定度与放大器放大倍数有直接关系,在大功率 电源里基本上是倒数关系。运放的温度漂移和失调对 电路的精度和温度稳定性有很大的影响[4]。
为此,设计了一个新型的激磁电路,并将激励电流 反馈到A/D转换器,以消除激励电流不稳定对A/D 转换结果的影响,如图2。
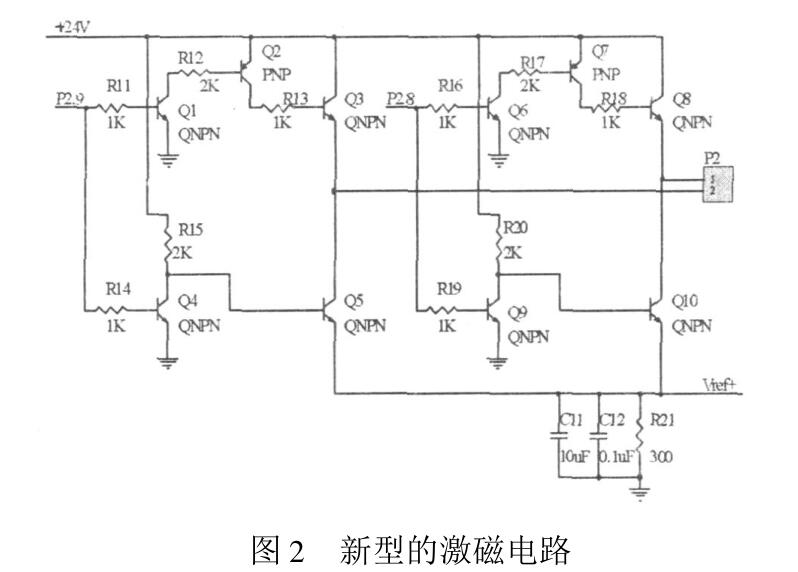
其中+24V是由220V的交流电通过变压、整流、 滤波之后,输入可调集成稳压器LM317 ,通过高精度 的滑动变阻器调节而得到的恒压源。LM317保证1. 5A输出电流,典型线性调整率0.01%,典型负载调整 率0. 1 % ,80dB纹波抑制比,输出短路保护,过流、过热 保护,调整管安全工作区保护。系统的微控制器采 用ARM7芯片STR710 ,通过它的I/O端口控制图2 中的P2. 8和P2. 9 ,ARM7芯片STR710进行控制,使 端口 P2输出正负24V交变的矩形波,从而对传感器 激磁。另外,Vref( +)接该系统A/D转换器的参考输 入端 VREF ( + ) 。
整个电路的工作过程为:当P2. 9为高电平时, Q1、Q2、Q3、Q4导通,此时Q5的基极电流为零,Q5截 止,此时P2的端口 2输出+24V的电压。此时P2. 8 为低电平众、Q7、Qs、Q9,此时有电流流经Q1。基极,并 使其基极和发射级导通,Q1a的功能相当于一个二极管 的作用,此时P1端口没有电压输出。那么,A/D转换 器的参考输入端Vref ( +)为:
其中’ VP2是P2端口输出电压幅值的绝对值,此 处应该是+24V。整个电路是对称的,且R'5 = R20 ,当 P2.9为低电平,P2.8为高电平时,P2的端口 2无电压 输出,端口 1输出+ 24V的电压,Vref( +)值不变,如 此周而复始输出频率为6. 25Hz的的双极性矩形波。 用Multisim仿真结果如图3所示。

此夕卜,把Vref( + )作为A/D转换器的参考输入, 可以大大提高系统的温度稳定性。A/D转换的结果 可表示为:
ry n ry n
D = Vref+ .Vm= V ref+ ^ ^ ^
其中,VmS经放大、滤波处理过的电压信号,也是 A/D转换器的输入信号,VoUt为传感器输出的原始流 量信号,K0为信号放大倍数。
由式(11)、12)可知,在保证R21精度的前提下, A/ D转换的结果只与液体的流速有关,不受电磁流量 传感器线圈电阻变化的影响。该电路通过MCU控制 三极管的通断得到激磁信号,三极管的为电流控制元 件,该电路实现了小电流控制大电压,三极管的功耗 低,电路的响应速度快,温度稳定性好,抗干扰能力强, 对电磁流量计整体精度的提高起到了决定性的作用。 3.2微分干扰和工频干扰的消除
信号中往往同时存在微分干扰和工频干扰信号, 在信号处理电路中的低通滤波往往很难将工频干扰完 全滤出。本系统采用了同步采样和工频补偿技术,以 抑制流量信号电势中混入工频干扰和工频电源频率波 动产生工频干扰,并有效去除微分干扰。同步采样技 术,采样开始时间滞后激磁信号1/4个周期,其采样脉 宽为工频周期的偶数倍,消除微分干扰的同时使流量 信号电势中工频干扰平均值等于零,以消除工频干扰 的影响;工频电源的频率波动补偿是保证频率的动态 波动中,激磁电源和采样脉冲得以同步调整,真正实现
同步采样技术和同步激磁技术,同步A/D转换,降低 了微分干扰和工频干扰的影响。
零点漂移消除
所谓零点漂移,就是当传感器的输入信号为零时, 放大器的输出并不是零[6]。零点漂移的信号会在各级 放大的电路间传递,经过多级放大后,在输出端成为较 大的信号,由于传感器输出的有用信号较弱,零点漂移 就可能将有用信号淹没,使电路无法正常工作。零点 漂移可分为基线零点漂移和斜率零点漂移[7]。对于零 点漂移的抑制,该系统采用软硬件相结合的措施。硬 件电路方面,采用三运放的差动电路输入,实现对大内 阻的微弱信号采集,并有效抑制了共模信号的引入m。 一级放大电路之后采用隔直电容,滤除基线零点漂移, 防止直流信号过大,超出A/D转换的输入范围。
有时硬件的方法是不可能完全满足系统的要求 的,必须结合软件的方法才能更好地达到系统的要求, 也就是现在所说的软件即是虚拟硬件。结合硬件采用 软件的方法简单易行,可以很好消除采集数据中的零 点漂移,并且其成本比用硬件的方法低,改进软件的算 法可以方便实现对系统的改进。对于该系统的零点漂 移,采用“计算斜率法”和“正负差值法”相结合的方法 可以很有效地消除基线零点漂移和斜率零点漂移对电 磁流量计精度的影响。
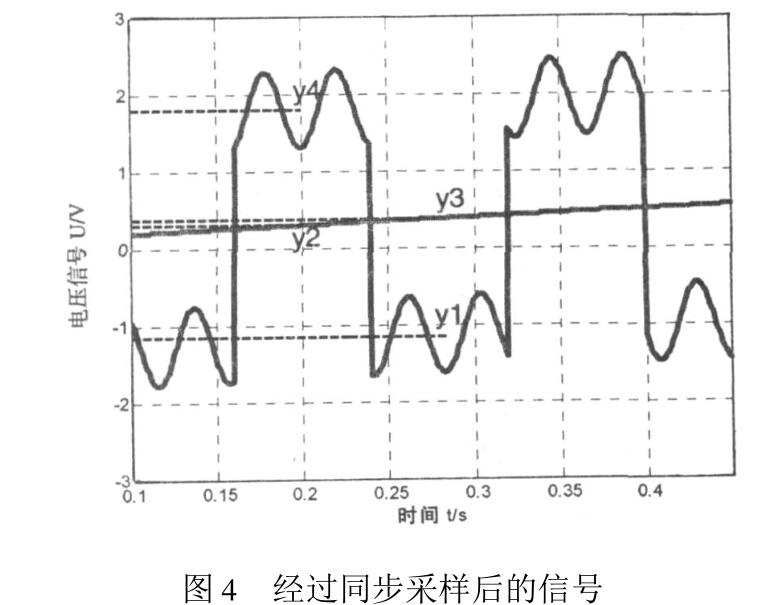
图4为经过信号处理和同步采样后的信号,同时 存在基线零点漂移和斜率零点漂移。斜率零点漂移则 多见于积分系统,随着时间的推移,积分器的零点可能 会出现随时间累加漂移。此外,外界的环境温度的变 化也是斜率零点漂移产生的重要原因。
鉴于斜率零点漂移产生的机理’可以在标定的时 候确定零点漂移的斜率K。也就是在管道液体静止不 动流量为零的时候对输出信号进行采样,设从时间6 进行采样’采样历时山,经过一段时间后又从f2开始 采样,历时么后采样结束。分别得到两组离散的信号
X1到X„和X〗到分别除去最大值、最小值后对剩 下(n - 2)个值进行平均,得:
x 。(xi 本 xmax ^且 xi 本 xmin) (13)
n- 2
= 1 2 〉X/i(x i ^ max 且 X、矣 X mJ (14) n- 2
那么斜率零点漂移的斜率为:
k = X - X (15)
12 - f1
对于基线零点漂移,“正负差值法”是比较有效便 捷的选择,它不需要直接消除信号中的基线零点漂移, 而是通过算法上去掉基线零点漂移对测量结果的影 响。该系统中,激磁信号的频率为6. 25Hz,由于所测量 的液体流速不会有明显的突变,所以在信号的一个周 期0. 16s内,可以采用一个波峰减去波谷的均值来表 示此时的流量信号,也即如图3中I n - J1 I ,其中为 是从nT + T/4到nT + T/2采样结果的算术平均值’ J1是从到(n + 1) T进行米样结果的算术平均值。但是 由于斜率零点漂移的存在,会出现如图3中I方-y2 I 的误差,所以需要利用式〈15)的结果对该误差进行修 正’修正后的结果也就是此时管道中液体感应出的电 动势为:
1 . T 1 ; X7 - X
U = 21 y3- y2 + k ■ 21 = 21 y3 _ y2 + h - h
• 2T 1 (16)
对于式(16)结果,去除了工频干扰、微分干扰、零 点漂移的影响,大大提高了电磁流量计的测量精度。
其他去除干扰的措施
对于由电磁流量传感器的“变压器效应”所产生的 正交干扰,采用“变送器调零法”来消除,这个方法既方 便又实用。
软件设计方面,采用了数字滤波技术,它能完成模 拟滤波不能完成的功能,很容易剔出脉冲干扰,消除数 字电路毛刺,提高A/D转换的抗工频干扰能力以及输 入微处理器数字的可靠性。此外,还采用了掉电保护 技术,软件指令冗余措施,软件陷阱抗干扰方法以及看 门狗技术,这些措施的采用有效地排除了智能电磁流 量计微处理器失控。
在PCB电路板制作上,采用数字地与模拟地分开 走线并加粗,最后用0欧电阻单点相连。数字电源与 模拟电源也分开供电,合理加装了去藕电容,并协调好 不同类型IC的点评匹配。数字信号和模拟信号分开 走线,有效防止了并行走线产生寄生电容和共生电容。 选择高性能的抗干扰芯片,这是抗干扰技术重要环节。
在电磁流量计的安装方面,使传感器的外壳应接地,并且将流量调节阀门放在流量计的下游,垂直安装 (若水平安装的流量计应保证上游10倍直径,下游5 倍直径的直管段),这样达到整流的目的,从而减小了 流速分布不均对测量精度的影响。减短信号传送电 缆,否则由电缆分布电容引起的负载效应就会增大测 量误差,也增加了信号受到干扰的可能。
4.结束语
智能电磁流量计多种抗干扰技术的采用,大大抑 制和消除了干扰信号对有用信号的影响,增强了电磁 流量计的抗干扰能力,经电磁流量计制作样机反复实 验证明,测量精度可达到0. 5 % ,提高了以往测量的精 度和可靠性。
上一篇:压力表检定及常见问题处理措施

