改进的二维Otsu算法在SF6压力表盘图像分割中的研究
为了提高SR压力表盘图像分割准确度,对比了传统二维Otsu和Otsu双阈值分割算法,给出了 一种改进二维Otsu算法。针对二维Otsu算法选取最佳阈值时存在的缺陷,将整体阈值再区分并结合离差 平方和作为适应度函数选取最佳阈值,提高了目标图像的阈值分割效果。实验结果表明:所提算法不仅满 足对S&压力表盘图像进行目标区域分割,同时具有更高的稳定性、快速性和分割精度。
1.引言
压力表盘是变电站主设备之起着控制和保护 系统的双重作用,但其气体泄漏不仅降低压力的绝缘强度, 还易造成空气污染,所以对气体泄漏引起的压力、密度下降 及变化趋势的监测至关重要。传统人工监测模式具有较强 主观性,且效率低,无法实时监测表盘指针读数,故研发代 替人工方式识别SFe压力表盘指针读数的智能遥视系统成 为重点。而SR压力表盘图像分割是智能遥视系统处理过 程的重要步骤,保证了后期图像特征提取和刻度识别的精 确度。针对图像分割领域的研究,国内外学者提出了很多 有效的图像分割算法,如直方图分割1、k-Means和SVM 结合的图像分割0、基于Mean Shift的芯片X光图像层次 分割3、Tsallis熵参数图像阈值分割4、基于最大累积剩余 熵的红外图像分割H、改进差分进化的二维最大熵图像分 割[6等算法,均具有较好分割效果。传统二维Otsu图像分 割算法能更好地将待处理图像的目标区域像素从含背景区 域图像中分离出来,但易造成目标与背景信息部分缺失,影 响表盘图像分割效果,且具有计算量大、计算时间长等缺 点。因此,寻求一种好的图像分割算法对SR压力表盘图 像分割具有重要价值。
陈英针对Brodatz纹理库图像采用基于向量机和灰度 共生矩阵方法进行纹理图像分割,结果表明该方法具有较 好的分割效果0。陈修桥根据图像二维直方图中目标和 背景分布的最大相关量来选择阈值,将遗传算法用于对二维最大相关准则阈值分割的优化,结果表明该算法的图像分 割效果较好,且比传统最大相关准则具有更强抗噪声能 力[8。林正春研究了最优进化图像阈值分割算法,重新定 义适值函数和选择机制并结合适当的交叉率和变异率得到 最优阈值,实验表明该算法稳定性高0。吴一全研究了 二维直方图区域斜分阈值分割及快速递推算法,通过4条 平行斜线将直方图分成内点区、边界点区和噪声点区,并采 用与主对角线垂直的斜线进行阈值分割,结果表明,该方法 可以应用于所有基于二维直方图的阈值分割,且具有边界 准确、抗噪稳定和运行时间少等优点M。
本文基于SF6压力表盘图像对比了传统二维Otsu和 Otsu双阈值,给出了一种改进的二维Otsu算法。算法将整 体阈值再区分并结合离差平方和作为适应度函数选取最佳 阈值,不仅满足对图像进行目标区域分割,同时具有更高的 稳定性、快速性和分割精度。
1.传统二维Otsu阈值分割
传统二维Otsu算法针对目标类和背景类分离计算,当 阈值(s,t)使最大类间方差取最大值时,则该阈值组合为 Otsu算法的最优阈值。其理论如下所述:
假设图像/(x,y)灰度级为L (0,i L-i),其邻域
平滑图像g(x,y)的灰度级为乙则图像每个像素点数f.的 像素灰度值i和邻域平均灰度值]即为二元组,图像总像素 数为M, 二维联合概率密度M为

任意给定阈值(s , t),将图像分割成4个区域,则二维 Otsu阈值分区如图1所示。
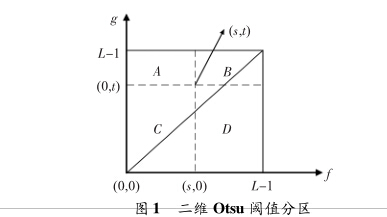
其中,对角线上的区域B和C分别对应于目标和背景,
而远离对角线的区域A和D对应边缘和噪声,s和t分别为
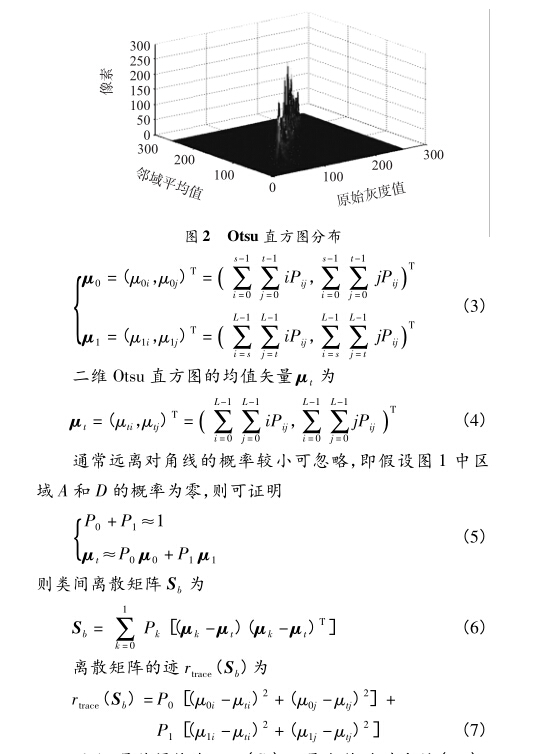
灰度分割和邻域灰度均值分割阈值。 Otsu 算法的直方图分
布如图2所示。
设背景和目标分别为C。和Ci,其概率P。和Pi为

U= jgPij
目标类和背景类对应的均值矢量M。和fli为r^o = W,) T = (H iPtj,% ^ Jpij)
因此,最佳阈值为(Sb)取最大值时对应的(s,t)。 但其只考虑类间的相似度,而忽略了类内聚合性,结论必然 存在缺陷,影响图像分割效果且计算量大。
2 .二维Otsu双阈值
在图像灰度直方图中设定合理的分割阈值,该阈值作 为区分目标与背景的界限,若分割后满足目标与背景类的 类间方差最大,且类内方差最小,则该阈值为最佳分割阈 值。具体过程如下:
设待处理图像有L个灰度级,目标区域4和背景区域 B由阈值t区分,Pi为图像中灰度级为i的像素出现概率
rpA = % p;
i=0 (8)
U = x p;
i = t + i
式中PA和PB分别为目标区域和背景区域像素概率和
_ L-i
「P = % iP;
—% iPi
Pa = (9)
—% iPi
P 一 i=t+i
B 一 Pb
![]()
|
|
式中PA和PB为目标区域和背景区域灰度的概率均值, P为整副图像灰度的概率均值。则目标类和背景类的类内 方差和类间方差为
改进的OtSU算法可以通过调节权值参数改变分割效 果,减少了目标细节在分割中遗失的情况发生[13]。
3.改进二维Otsu算法
根据传统二维Otsu直方图分布可知,大部分像素分布 于二维直方图对角线附近,因此,区域B和区域C中像素点 的个数最多,而区域A和区域D像素分布较少,通常,计算 时忽略,但部分区域也包含目标和背景类的像素点,若忽略 必定造成目标与背景信息缺失,影响分割效果,若将所有像 素点纳入计算,又会导致计算量大,计算时间长等缺点。快 速Otsu算法将传统二维直方图分块处理,对f = g - N和f = g + N窄带区域的像素点进行分割运算,且略去其他像素区 域,N取值变大使窄带区域增加,所有像素点能被包含在窄 带区域。
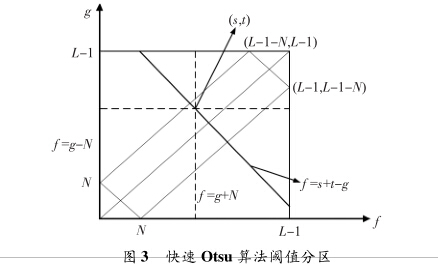
设分割阈值为(s,t),F&‘A, ‘B, ‘C , ‘D’进行分
割,而以通过点(s,t)且与对角线垂直的直线来进行分割。
该直线左面的点对应于C。目标类,右边点对应于q背景
类。其辅助直线方程为
f =s +t -g (13) 则,当f在S + t - g时,属于Ct ;当f < s + t -g时,属于C0。因
D0 = S (x0i - x0 ) (x0j - x0 )
*0., x0j e G0
(*1; - *1) T (*1; - *1)
D0+1 = S (*i - *珋 T (*; - *珋
*i,*;-eG0UG1
式中D0和D1为目标和背景类的类内离差平方和;G和分类准则与s + t有关,则将s + t整体作为阈值,实现阈值 降维。
快速Otsu算法,通过s + t整体作为阈值,从而达到降 维计算的效果,获得更快速处理效率,但存在一个缺陷s + t 整体包含了(s,t)阈值的多种组合,要获得更精确的阈值分 割效果,依靠两个阈值的和进行分割是不够的,需要再对满 足和值的组合进行优化计算,选出最佳的阈值组合,以获得 更好的分割效果。
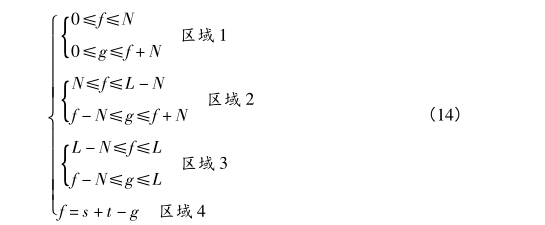
在上述计算中,/ = g - N和f = g + N两条辅助线已经划 分了目标类和背景类的像素区域,所以,(s,t)阈值组合也 需满足该区域,即满足如下限制条件 (■0^/^^N Wg^f + N rN^f^L - N
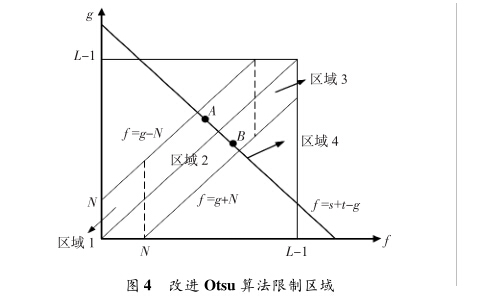
其中,第4分区是必须满足的,即s +1组合的点必定在 直线f = s + t -g上,其余的3个区域中至少满足一个区域。 如图4所示B两点满足区域4和区域2,且假设s + t组 合最佳位置处,s + t可以分解为A( sj, t1)和B( s2, t2)两点, 则分别将IB两点作为最佳阈值点进行计算比较。
经过限制条件的筛选,将符合需要的阈值组合进行逐
计算,求出最优阈值组合,本文将该计算函数称为最优适
应度函数,同时,引入离差平方和法作为传统二维Otsu算
法的又一最优阈值约束条件,从而给出一种新的Otsu算法
作为最优适应度函数。离差平方和法[15]式(15)所示
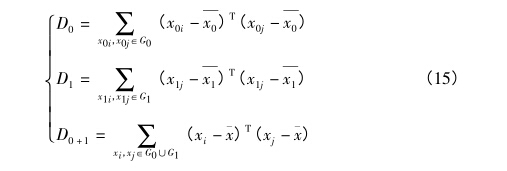
G1为目标和背景类;x为数据集。目标和背景类的n个样 品均值%和X1分别为
将上述经限制条件筛选出的阈值坐标带入最优适应度 函数,对比所有组合得数,选取使最优适应度函数达到最大 值的阈值为最优阈值s-和t-。改进二维Otsu算法因添加 离差平方和计算则需再对角线窄带区域进行遍历,但由于 窄带面积较小,计算复杂度降低,提高了计算速率,且维持 了原有算法优点,在一定程度上提升了传统二维Otsu算法 阈值分割效果,且避免了由于单一法排除边缘和噪声区域 而遗漏部分目标和背景像素的问题。
4.实验结果与分析
为了验证该算法有效性,利用Matlab实验平台环境,选 取传统二维Otsu (算法1)、Otsu双阈值(算法2)和改进二 维Otsu(算法3)的算法进行分割效果及时间对比,实验对 象选用SF6压力表盘图像,实验结果如图5和图6所示。
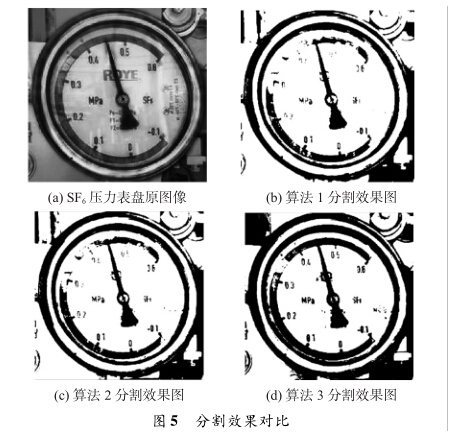
由图5分析知:二维Otsu算法在SR压力表盘图像分 割后丢失部分信息而右侧出现块状阴影,影响后续识别
根据图6可知分割时间为:二维Otsu算法310 ms; Otsu 双阈值算法280 ms;改进二维Otsu算法Otsu双阈值算法延续二维Otsu算法优点,效果优于传统 二维Otsu算法,但还是存在部分阴影影响识别;最后使用了 本文改进二维Otsu算法,很大程度弥补了丢失的信息且消 除阴影,分割效果更优。三种分割算法的处理时间如图6 所示。
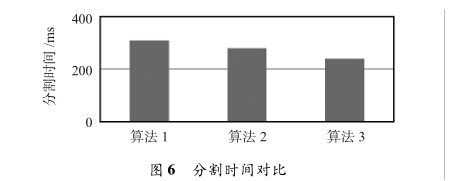
根据图6可知分割时间为:二维Otsu算法310 ms; Otsu 双阈值算法280 ms;改进二维Otsu算法40 ms。故改进二 维Otsu算法分割时间较算法1和算法2少,且在分割效果 上处于优势,更能满足识别要求。算法的时间复杂度r(n) 表示该算法的执行效率,如式(19)所示。
T( n) = O(f( n)) (19)
式中f( n)为71 n)的同数量级函数,n为模块。3种算法的 时间复杂度如表1所示。

随着模块n的增大,算法执行时间的增长率和/(n)的 增长率成正比,因而/(n)越小,算法的时间复杂度越低,算 法的效率越高。所以,传统二维Otsu阈值分割算法因对(s, t)双重循环使得运算次数增加,而改进二维Otsu阈值分割 算法因添加离差平方和计算需再对角线窄带区域进行遍 历,但由于窄带面积较小,故计算次数远少于传统二维Otsu 算法,降低时间复杂度,减少了运算时间。
5.结论
本文以SFe压力表盘图像为对象研究了传统二维Otsu 和Otsu双阈值,并结合其优缺点提出了一种改进二维Otsu 阈值分割算法,该算法将最优适应度函数作为阈值选取限 制条件,并引入离差平方和法为二维Otsu算法的又一最优 阈值约束条件,从而给出一种新的Otsu算法作为最优适应 度函数来筛选最优阈值。通过实验表明:该算法在阈值分 割效果及计算时间上确定了平衡点,优化后的阈值处理效 果更能满足表盘监测识别,因此,改进算法对进一步研究基 于智能遥视系统的SR压力表盘图像处理有重要价值。
下一篇:一般压力表示值变化规律硏究

