模板匹配机械指针式压力表示值智能识别方法研究
压力表在使用过程中,经过一段时间的使用与受 压后,机芯会出现一些变形和磨损,导致各种误差和 故障产生。为了保证其原有的准确度而不使量值传递失真,需及时对其执行周期检定,以确保示值准确,可靠。传统方法是通过手工操作,利用目测完成压力表 检测,并且要求检定人员同时要做瞄准、读数、记录等 多项工作。该方法具有劳动强度大、效率低、检测误差 大、可靠性差等问题。如何实现压力指针式仪表的自 动智能检定和记录分析,提高检定工作效率,成为一 个迫切需要解决的问题。
国内外提出了很多仪表识别方法:2006年,潘伟 等人利用脊波变换方法对几种含噪声的图像进行直线 检测,结果表明脊波变换能较好地提取直线特征。同年, 唐敏等人提出了一种基于自适应脊波变换的边缘检测 方法。这种方法以脊波变换为理论基础,具有多方向和 多尺度性,能对图像中不同方向的边缘特征进行有效表 示和检测。李盛阳、叶梧等利用图像形态骨架细化方法 和Hough变换对指针式仪表读数进行识别。Correa.Ale_ gria等介绍了利用机器视觉对指针式仪表的检定过程。 首先采用摄像头采集全局的表盘图像,然后用减影法将 两个不同位置的指针图像保留下来,再利用Hough变换 得到指针的角度,之后将原始图像做几何变换,使得表 盘上的刻度线成为一条水平线并与指针垂直,然后得到 指针的读数。笔者所设计系统要求每次对6个压力表进 行识别,上述方法不能直接应用到系统中。
因此,笔者根据前人的研究和模式识别理论,提 出一种基于模板匹配的仪表识别方法,使仪表图像在轻微变形、光照变化等情况下都能被较准确地读数。
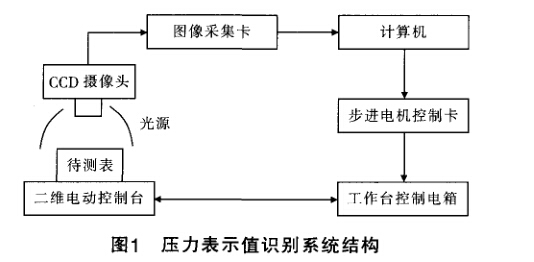
―、压力表识别系统结构
系统结构如图1所示,待测压力表安装在自制的 二维电动工作台,每次安装6块压力表。工作台控制电 箱负责对表进行加压和减压。在二维电动控制台前端 安装高分辨力的摄像机。摄像机拍摄的压力表视频被 安装在计算机上的图像采集卡采集。通过在计算机上 编写智能识别算法,对采集的压力表图像自动识别,获 取指针准确位置,计算出其指示量值,与标准数字压力 表示值进行比对,计算出仪表的示值误差和回程误差, 将结果存人数据库。需测量压力表轻敲后的指针示值 变动量时,步进电机控制卡负责控制力锤实现对压力 表表壳的轻敲,从而达到轻敲位移的检定要求。
二、基于模板匹配的智能识别算法
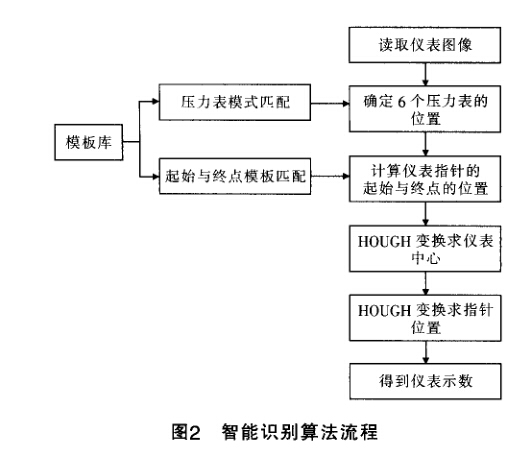
对于压力表读数识别方法来说,计算仪表的起点 和终点的位置、角度以及中心点的位置是关键步骤。 借鉴与目标跟踪模板匹配算法的思想和仪表图像的 特点,提出使用模板匹配的方法求上述关键数据,具 体流程如图2所示。
1.模板匹配
模板匹配方法的基本思想是把一个预先存储的目 标图像模板作为识别和测定目标位置的依据,对目标模 板与实际图像的各个子区图像进行匹配(计算相关函数 值),找出和目标模板最相似的一个子图像的位置。
首先采集众多已知仪表的图像,将完整的仪表图 像、最小量程、最大量程的子图像保存到模板库中。然 后使用归一化互相关匹配方法,对采集的图像进行遍 历搜索和匹配。
归一化互相关匹配(Normalized Correlation,NC) 算法是一种经典的匹配算法。具有很高的准确性和适 应性,对图像灰度值的线性变换具有“免疫性”,即所 求的NC值不受灰度值线性变换的影响。通过计算模 板图像和待匹配图像的互相关值来确定匹配的程度。 互相关定义如下:
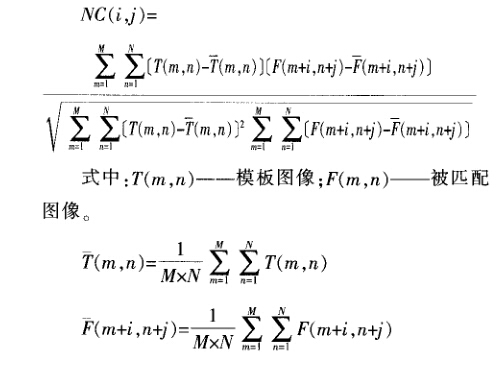
式中:——模板图像的均值图像 n+j)——被匹配图像的均值图像。
互相关值最大时的搜索窗口位置决定了模板图 像在待匹配图像中的位置。通过计算模板库中的各个 模板与压力表图像的最大NC系数,求得6个压力表的 准确位置以及每个压力表的起点和终点位置。
2.Hough变换计算仪表中心和指针位置
Hough变换是利用图像的全局特性而对目标轮廓 进行直接检查的方法,其核心思想是点线的对偶性, 通过变化将图像空间转换到参数空间。
在图像XY里,所有过点0,y)的直线的方程为
y=px+q
式中:p——斜率W——截距。可改写成如下形式:
q=-px-\-y
上式可以看做代表参数空间pq中过点(/>,<;)的 一条直线。在图像空间中共线的点对应在参数空间里 相交的线,反过来,在参数空间里相交于同一个点的 所有直线在图像空间里都有共线的点与之对应,这就 是点-线的对偶性。Hough变换就是根据这样的关系 把空间里的检测问题转换到参数空间,通过在参数空 间里进行简单累计统计完成直线的检测任务。
Hough变换所采用的基本策略是根据图像在图像空 间内的点在所对应的参数空间里,计算出符合对偶特性 的参数点的所有可能的轨迹,并通过累加参数点的数量 作出最终决策。因此,Hough变换不仅能检测直线等一阶 曲线目标,对于圆、椭圆等各类曲线,同样可以进行检测, 只是其计算量会随着解析式阶数的增加呈指数增加。
直线检测的具体算法如下:利用Hough变换将原 始图像中给定直线上的所有点都集中到变换空间的 某个点形成峰值,再寻找峰点累加数的最大值即可确 定出指针所在直线y=pA;+(jr。
知道了斜率p,结合模板匹配方法求得的起始和 终点位置,就可以确定指针与零刻度线的偏转角度, 从而计算出仪表的读数。
三、实验结果
由于彩色图像处理复杂,因此摄像头采集到的待 处理图像转换为灰度图像,然后使用Hough变换检测 仪表的指针结果。
假设压力表量程为0~10kPa,通过Hough变换计算指针与尤轴的夹角0(~45°专6>在225。),设所求的指针读 数为t则有,这样就可求得仪表指针示值。
实验中,对单个仪表测试了 10组数据,结果如表1 所示。
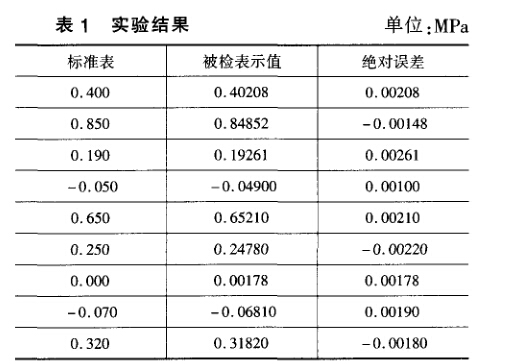
由表1可以看出,提出的算法自动识别所得到的 测量示值可准确到小数点后五位,远超人眼识别的分 辨力和准确性,满足了读数要求。
四、结束语
本文对基于图像处理技术的指针式仪表自动读 数识别方法进行了研究,提出了一种高准确度的基于 模板匹配的指针式仪表读数自动识别方法。提出的方 法降低了人工识别方法繁重复杂的工作量,提高了工 作效率。由于使用一个相机同时采集6个压力表,部分压力表会变形,影响识别精准程度,后续研究使用双 目相机识别的方法,提升识别准确度。

